March 5, 2025
Research Perspectives: Zdravko Dugonjić in the LASR and its Recent Publication
During his studies in machine learning at Novi Sad and Grenoble, Zdravko collaborated with researchers from the Laboratoire d'Informatique de Grenoble, which eventually inspired his decision to pursue a career in academic research. Today, he is a SECAI PhD student at the Learning, Adaptive Systems, and Robotics Laboratory (LASR) at TU Dresden, where his work focuses on touch perception and its applications in the medical field. Recently, LASR achieved significant progress in this area with their publication in Science Robotics titled “NeuralFeels with Neural Fields: Visuotactile Perception for In-Hand Manipulation“.
Witnessing the rapid advancements in machine learning over the past decade and the convergence of neural architectures across various subfields, Zdravko recognized the perfect opportunity to focus on underexplored modalities within the research community. His research aims to investigate how touch as a sensory modality can enhance our understanding of human tissues, particularly in the context of cancer detection and surgical assistance. Joining a newly established laboratory led by Professor Roberto Calandra, dedicated to machine learning, robotics, and touch sensing, was an ideal step toward realizing his long-term goals. Under the mentorship of Professor Roberto Calandra and Professor Stefanie Speidel, Zdravko is currently developing the next generation of tactile sensors designed for medical applications.
Professor Roberto Calandra, who leads the Machine Learning for Robotics chair at TU Dresden, and Professor Stefanie Speidel, an expert in Translational Surgical Oncology at the National Center for Tumor Diseases Dresden (NCT), combine their complementary expertise in machine learning, tactile sensing, and surgical robotics. Over the past year, LASR, leveraging strong collaborations, has open-sourced three tactile sensors designed for diverse applications in robotics and medicine. Zdravko emphasizes the significance of joint research efforts with collaborators from Stanford University (USA), Meta AI (USA), and the NCT Germany.
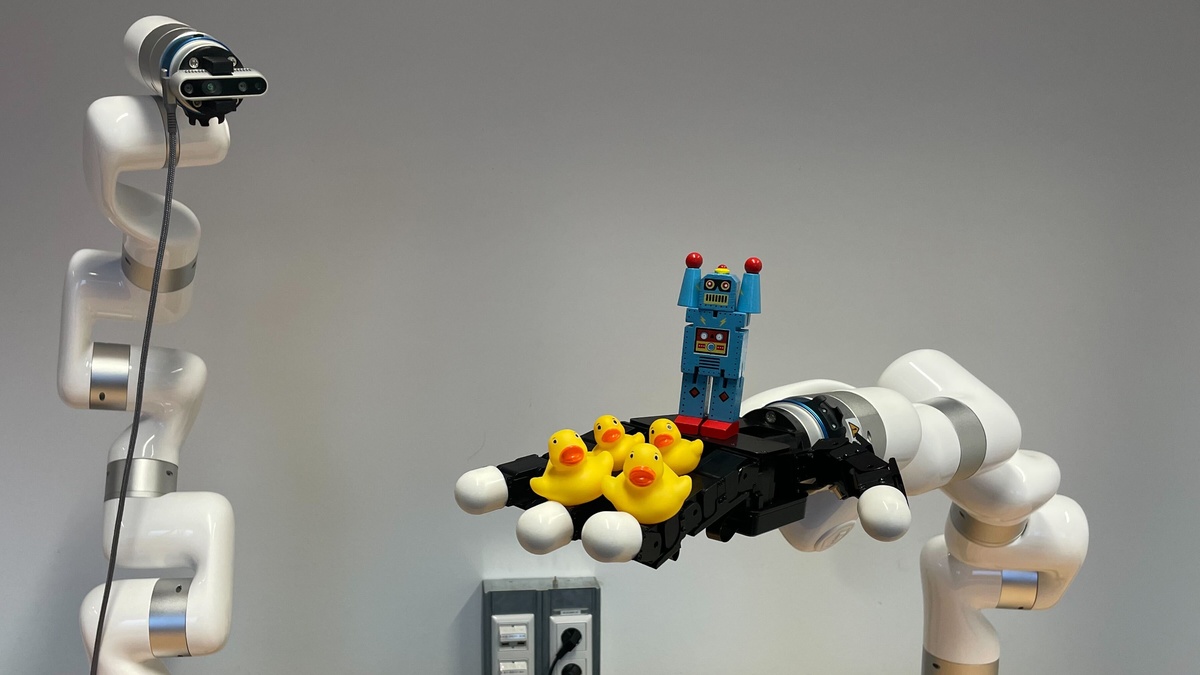
Recently, LASR contributed to groundbreaking research on the role of touch in robotic hand manipulation. Their article, “NeuralFeels with Neural Fields: Visuotactile Perception for In-Hand Manipulation,” published in Science Robotics, demonstrated how touch perception enhances a robot's understanding of objects it manipulates. Beyond advancing scientific knowledge, LASR actively fosters community engagement. Last year, they hosted the inaugural Touch Sensing and Processing Summer School, aimed at providing equal opportunities for young researchers worldwide to connect with leading experts in the field.
News All News
 © Franziska Werner
© Franziska Werner



